In questi giorni il team di bioingegneri composto da Arti Ahluwalia, Carmelo De Maria e Chiara Belmonte si trova a Nairobi per tenere un corso intensivo nell'ambito del progetto Afra Moya, di cui il...
Leggi tutto
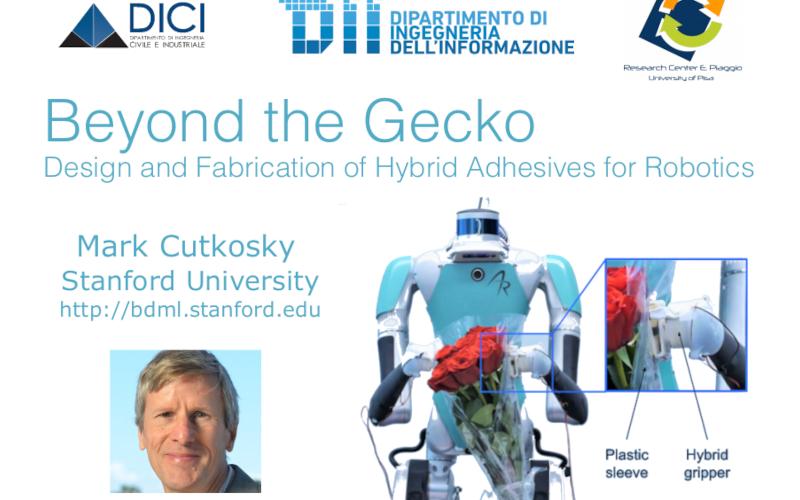
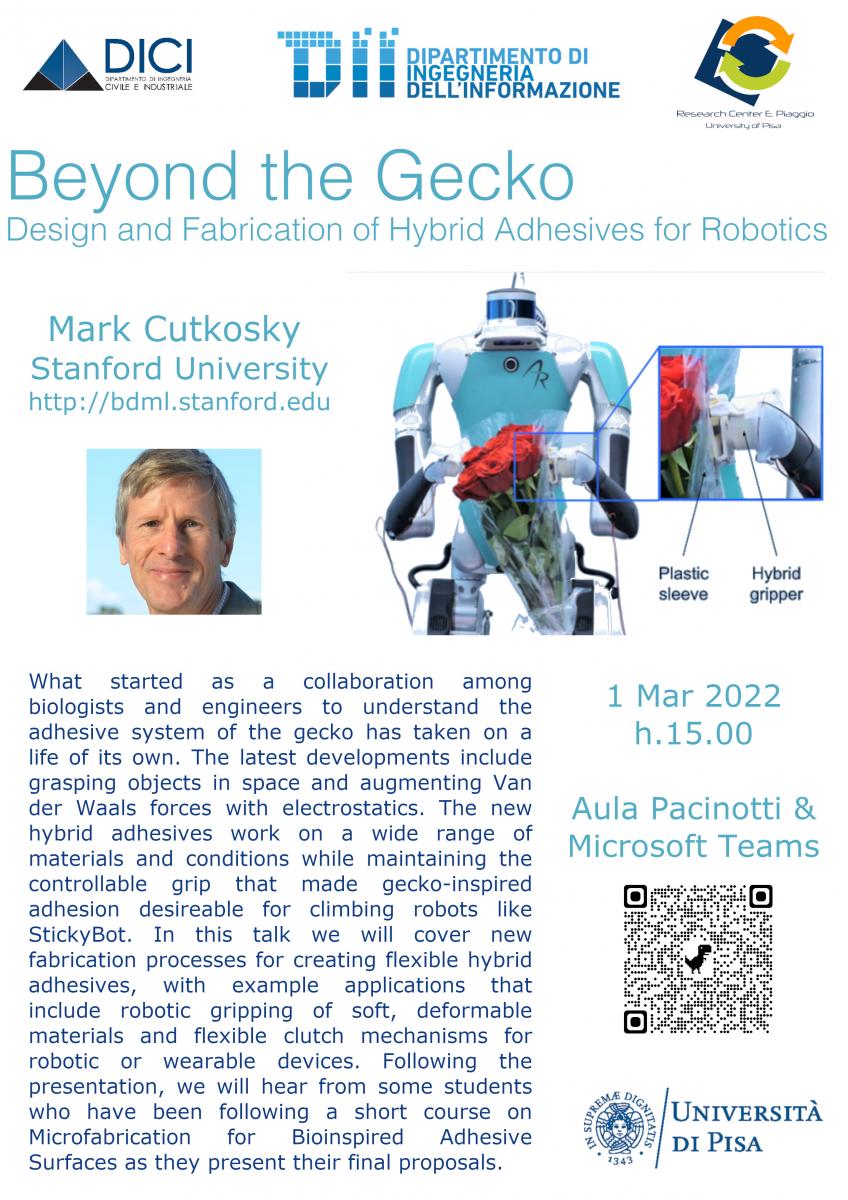
Mark Cutkosky, Stanford University
1 marzo h. 15.00
Aula Pacinotti
Online Microsoft Teams
Abstract
What started as a collaboration among biologists and engineers to understand the adhesive system of the gecko has taken on a life of its own. The latest developments include grasping objects in space and augmenting Van der Waals forces with electrostatics. The new hybrid adhesives work on a wide range of materials and conditions while maintaining the controllable grip that made gecko-inspired adhesion desireable for climbing robots like StickyBot. In this talk we will cover new fabrication processes for creating flexible hybrid adhesives, with example applications that include robotic gripping of soft, deformable materials and flexible clutch mechanisms for robotic or wearable devices. Following the presentation, we will hear from some students who have been following a short course on Microfabrication for Bioinspired Adhesive Surfaces as they present their final proposals.
Bio
Mark Cutkosky is the Fletcher Jones Professor in the Dept. of Mechanical Engineering at Stanford University. He joined Stanford in 1985, after working in the Robotics Institute at Carnegie Mellon University and as a design engineer at ALCOA, in Pittsburgh, PA. He received his Ph.D. in Mechanical Engineering from Carnegie Mellon University in 1985. Cutkosky's research activities include robotic manipulation and tactile sensing and the design and fabrication of biologically inspired robots. Cutkosky’s laboratory can be found at http://bdml.stanford.edu
In questi giorni il team di bioingegneri composto da Arti Ahluwalia, Carmelo De Maria e Chiara Belmonte si trova a Nairobi per tenere un corso intensivo nell'ambito del progetto Afra Moya, di cui il...
Leggi tutto![]()
Dipartimento di Ingegneria dell'Informazione
Via G. Caruso 16 - 56122 - Pisa
Tel +39 050 2217511 - info@dii.unipi.it
PEC: ing.informazione@pec.unipi.it
Info Didattica: didattica@dii.unipi.it
P.I. 00286820501 - C.F. 80003670504