
Mostrati in una demo alla Scuola di Ingegneria i risultati del progetto speciale per la didattica "LIMO", che ha coinvolto studenti e studentesse delle Lauree Magistrali di Robotica e Automazione,...
Leggi tutto
BMIFOCUS

Responsabile: Ing. Alessandro Tognetti
Brain Machine Interface in space manned missions: amplifying FOCUSed attention for error Counterbalancing- BMI FOCUS

L’idea alla base del progetto e lo sviluppo di un sistema di misura e di potenziamento delle abilita cognitive, delle funzioni sensorimotorie, delle funzioni emotive e del controllo dello stress nell’uomo in condizioni estreme. Questa esigenza si rivela particolarmente importante per quei soggetti che operano in condizioni e contesti dove non e possibile permettersi errori nelle attività operative, come gli astronauti durante le attività di pilotaggio di veicoli spaziali.
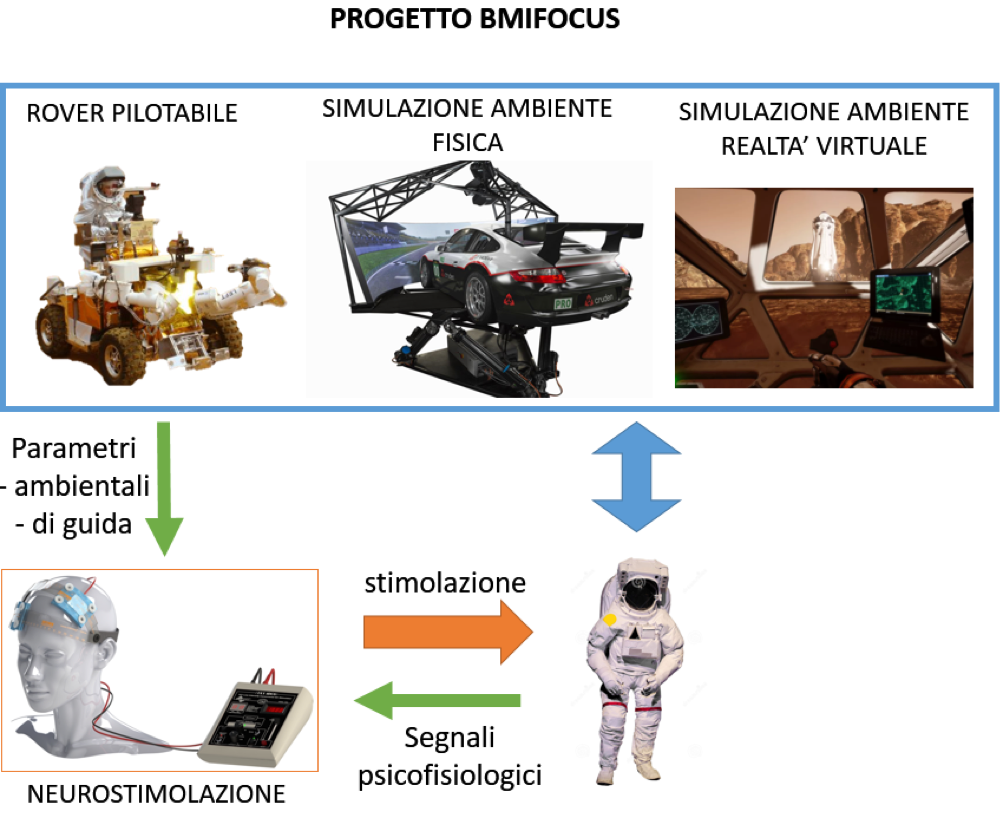
L’obiettivo generale del progetto sarà lo sviluppo di un sistema di neuro-stimolazione integrato in una piattaforma di addestramento per il pilotaggio di veicoli spaziali, sia in condizioni di simulazione sia in condizioni reali. Il sistema di neurostimolazione sara adattivo, ossia gestito mediante un’analisi in tempo reale dei segnali psico-fisiologici (ad es. elettroencefalografia, elettromiografia, elettrocardiografia, respirogramma, risposta galvanica cutanea), dei parametrici biomeccanici del soggetto, dei parametri ambientali, di simulazione e di guida al fine di incrementare ed ottimizzare le funzioni cerebrali cruciali per il raggiungimento dei compiti preposti di pilotaggio di veicoli spaziali.
La piattaforma di addestramento sarà in grado di riprodurre alcune operazioni, principalmente di integrazione sensorimotoria, critiche per le attività spaziali, tra cui: - le operazioni di guida dei veicoli di esplorazione spaziale quali i Rover pilotabili; - le operazioni di docking tra i veicoli spaziali. Queste attività necessitano di condizioni psicofisiologiche ottimali e rappresentano fasi particolarmente delicate nei viaggi interplanetari, in cui la vita stessa degli astronauti è messa a forte rischio, e la cui riuscita è cruciale per il successo dell’intera missione spaziale.
Inoltre, è importante essere anche in grado di addestrare gli astronauti ad alcune condizioni fisiche ambientali presenti nello spazio e non facilmente simulabili sulla terra, quali principalmente la riduzione della gravità. Per effettuare le operazioni di addestramento in ambiente reale, sarà realizzato un modulo Rover pilotabile integrato con il sistema di neurostimolazione. Per l’addestramento simulato sarà realizzato un sistema di realtà virtuale ed un sistema aptico indossabile indossabile dal soggetto. Tale sistema sarà costituito da un dispositivo robotico indossabile sugli arti superiori (braccia e mani) capace di registrare il movimento di chi lo indossa e in grado anche di esercitare delle forze sul soggetto stesso.
Tramite l’attuazione biomeccanica sarà possibile rendere pienamente reale l’esperienza di simulazione (ad es. simulando in modo efficace gli effetti a livello muscolare e scheletrico della riduzione/assenza di gravità). Il sistema aptico indossabile sarà combinato con un sistema di realtà virtuale (VR) immersiva in un sistema integrato di simulazione (SIS). Il SIS sarà in grado di variare le situazioni di simulazione in diversi scenari con anche con diversi livelli di difficolta, ad esempio introducendo imprevisti o problematiche, in modo da sottoporre il soggetto ad un carico di stress acuto variabile. Il gruppo DII svilupperà un dispositivo sensorizzato indossabile (bracciale sensorizzato) per il monitoraggio dell’interazione meccanica tra soggetto ed esoscheletro robotico durante la simulazione di gravità alterata. Il bracciale sensorizzato sarà costituito da un invaso che sarà fissato alla parte distale di ciascun braccio robotico e che avvolgerà parzialmente l’avanbraccio del soggetto. I sensori saranno integrati all’interno dell’invaso lungo tutta la superficie del sistema al fine di massimizzarne la risposta.

The idea behind the project is the development of a system for measuring and enhancing cognitive abilities, sensorimotor functions, emotional functions and stress control in humans in extreme conditions. This requirement is particularly important for those subjects operating in conditions and contexts where it is not possible to afford errors in operating activities, such as astronauts during space vehicle piloting activities.
The overall objective of the project will be the development of an integrated neuro-stimulation system in a training platform for piloting space vehicles, both in simulation conditions and in real conditions. The neurostimulation system will be adaptive, ie managed through a real-time analysis of psycho-physiological signals (eg electroencephalography, electromyography, electrocardiography, respirogram, skin galvanic response), the biomechanical parameters of the subject, environmental parameters, simulation and guidance in order to increase and optimize the crucial brain functions for the achievement of the tasks involved in piloting space vehicles.
The training platform will be able to reproduce some operations, critical for space activities, including: - the driving operations of space exploration vehicles such as the flyable Rovers; - docking operations between spacecraft. These activities require optimal psychophysiological conditions and represent particularly delicate phases in interplanetary travel, in which the life of the astronauts is put at great risk, and whose success is crucial for the success of the entire space mission. Furthermore, it is important to be able to train astronauts to some physical environmental conditions present in space and not easily simulated on earth, such as gravity reduction. To carry out the training operations in real environment, a Rover module will be implemented, integrated with the neurostimulation system. For the simulated training a virtual reality system and a wearable haptic system will be realized.
This system will consist of a robotic device worn on the upper limbs (arms and hands) capable of recording the movement of the wearer and able also to exert forces on the subject. Through the biomechanical implementation it will be possible to make the simulation experience realistic (eg by effectively simulating the muscular and skeletal effects of the reduction / absence of gravity). The wearable haptic system will be combined with a virtual reality system (VR) immersed in an integrated simulation system (SIS). The SIS will be able to vary the simulation situations in different scenarios, even with different levels of difficulty, for example by introducing unexpected problems or problems, so as to subject the subject to a variable acute stress load. The DII group will develop a wearable sensorized device (sensorized cuff) for monitoring the mechanical interaction between the subject and the robotic exoskeleton during the simulation of altered gravity. The sensorized cuff will consist of an enclosure that will be attached to the distal part of each robotic arm and which will partially wrap the subject's forearm. The sensors will be integrated into the bracelet along the entire surface of the system in order to maximize the response.

![]()
Dipartimento di Ingegneria dell'Informazione
Via G. Caruso 16 - 56122 - Pisa
Tel +39 050 2217511 - info@dii.unipi.it
PEC: ing.informazione@pec.unipi.it
Info Didattica: didattica@dii.unipi.it
P.I. 00286820501 - C.F. 80003670504