
La ricerca apre la strada a dispositivi che integrano memoria e calcolo su singolo chip per realizzare reti neurali, con l’obiettivo di ridurre i consumi energetici dell’AI
Leggi tutto
Secondo posto a RAMI 2025 per il team di robotica subacquea. Cristiano Caissutti vince il Best Poster Award

08 Luglio 2025
787
La sfida tra squadre di studenti universitarie di tutta Europa presso il Centre for Maritime Research and Experimentation (CMRE) a La Spezia
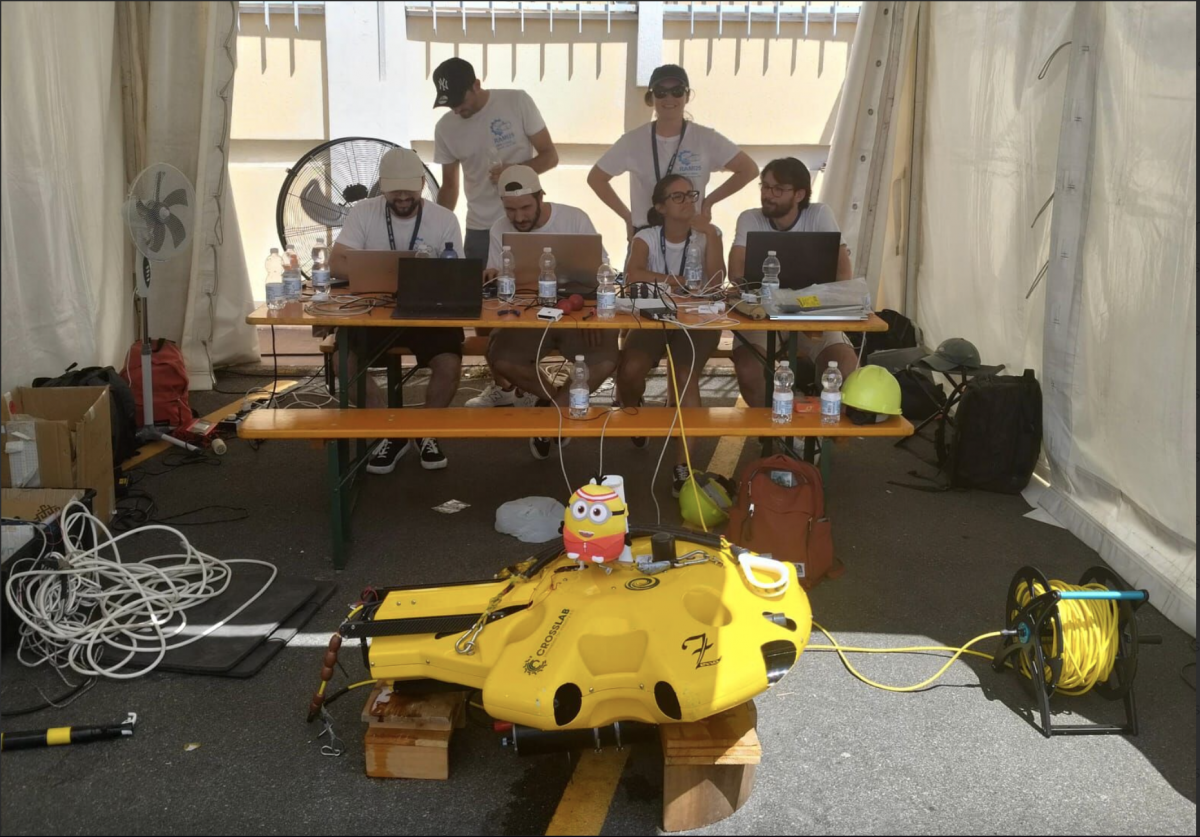
Secondo posto per il team di robotica subacquea del DII alla competizione RAMI 2025 organizzata dal NATO Centre for Maritime Research and Experimentation (CMRE) presso La Spezia.
La competizione ha visto la partecipazione di squadre di studenti universitari provenienti da tutta Europa che, con i loro robot AUV (Autonomous Underwater Vehicles), si sono sfidate su missioni di ispezione ed intervento sulla struttura.
Nel bacino antistante il CMRE è stato infatti ricreato uno scenario che simula un’infrastruttura critica sommersa che richiede di essere investigata a seguito di attività sospetta.

Al suo primo esordio con questa composizione, il team del DII (TeamERGO), un team misto di studenti di dottorato del DII e di studenti del corso di laurea magistrale in Ingegneria Robotica ed Automazione, ha partecipato ai task di ispezione con il robot Zeno, aggiudicandosi la seconda piazza. Il team era guidato in questa occasione da Alessandro Gentili.
Soddisfazione anche per la vittoria alla student poster competition dello studente di dottorato Cristiano Caissutti con il lavoro dal titolo: “Shared Autonomy through LLMs and Reinforcement Learning for Applications to Ship Hull Inspections”.

Lo studio sviluppa un sistema di autonomia condivisa per flotte robotiche marine eterogenee, con l'obiettivo di migliorare la collaborazione uomo-robot in attività marittime complesse come l'ispezione dello scafo di una nave. L'architettura integra interfacce in linguaggio naturale utilizzando modelli linguistici di grandi dimensioni, pianificazione di missione interpretabile tramite alberi comportamentali e coordinamento multi-agente tramite apprendimento profondo per rinforzo (DRL). Nello scenario d'uso, un operatore umano teleopera un AUV, mentre un secondo AUV, addestrato con DRL, segue autonomamente e si adatta al comportamento del leader. I risultati preliminari, ottenuti sia in ambienti simulati che lacustri, indicano che questo approccio a più livelli può ridurre il carico di lavoro degli operatori e supportare un coordinamento sicuro e consapevole delle intenzioni.
Complimenti a tutto il Team, a Cristian, e un enorme ringraziamento al CMRE ed in particolare a Gabriele Ferri per l’organizzazione di questo evento che è stata prima di tutto un’incredibile occasione di crescita per i nostri studenti.


![]()
Dipartimento di Ingegneria dell'Informazione
Via G. Caruso 16 - 56122 - Pisa
Tel +39 050 2217511 - info@dii.unipi.it
PEC: ing.informazione@pec.unipi.it
Info Didattica: didattica@dii.unipi.it
P.I. 00286820501 - C.F. 80003670504