La nomina a Distinguished Contributor (DC) premia i membri e gli affiliati della Computer Society che hanno apportato contributi tecnici significativi e continuativi alla IEEE Computer Society, alla...
Leggi tutto
A Michele Pierallini il premio per la migliore tesi di dottorato dell'Università di Pisa

23 Ottobre 2025
527
Michele Pierallini, che ha conseguito il dottorato in Robotica e Automazione al DII, si aggiudica il premio per la migliore tesi di dottorato discussa all'Università di Pisa nel 2024 nel settore "Ingegneria Civile e Architettura, Ingegneria Industriale e dell’Informazione”.
La tesi premiata, dal titolo "Planning and Control for Soft Robots. Learning in model-based paradigm " ha avuto come supervisori Franco Angelini, Antonio Bicchi e Manolo Garabini, docenti di robotica al DII, e si occupa di modellare e sviluppare algoritmi di pianificazione e controllo del moto dei cosidetti "soft robots", cioè robot in grado di riprodurre, grazie al design bio-ispirato del loro corpo, movimenti naturali in ambienti non strutturati.
Michele, 30 anni, si è laureato a Pisa in robotica e Automazione, per conseguire poi il dottorato, e ha condotto la sua ricerca nei laboratori del Centro “E.Piaggio” dell'Università di Pisa
"Recentemente - spiega Michele Pierallini - il design del corpo dei soft robots ha raggiunto un buon livello di accuratezza, tuttavia i metodi di pianificazione e controllo restano una sfida. Nella mia tesi, ispirato dal processo di apprendimento degli esseri umani, ho sviluppato un framework di controllo per perfezionare il movimento ottimo del robot, e mostro come l'elasticità renda possibile eseguire compiti nel mondo reale in modo più efficiente, come per esempio nel caso di missioni di monitoraggio in ambienti non strutturati. Parte della mia ricerca è ora applicata a un progetto di trasferimento tecnologico, Lookout Robotics, un servizio di monitoraggio e ispezione indipendente dall'hardware per siti industriali".
Il premio viene dopo un altro importante riconoscimento: la scorsa primavera infatti Michele è stato nominato nella rosa dei quattro finalisti per il ;premio Geroges Giralt, il riconoscimento per la migliore tesi di dottorato in robotica in Europa, conferito ogni anno all’ European Robotics Forum da EuRobotics AISBL (l’associazione di industrie e centri di ricerca Europei del settore). All'inizio dell'anno aveva inoltre ottenuto il Seal of Excellence, Marie Curie Postdoc Fellowship (MSCA) per l'eccellenza della sua ricerca.
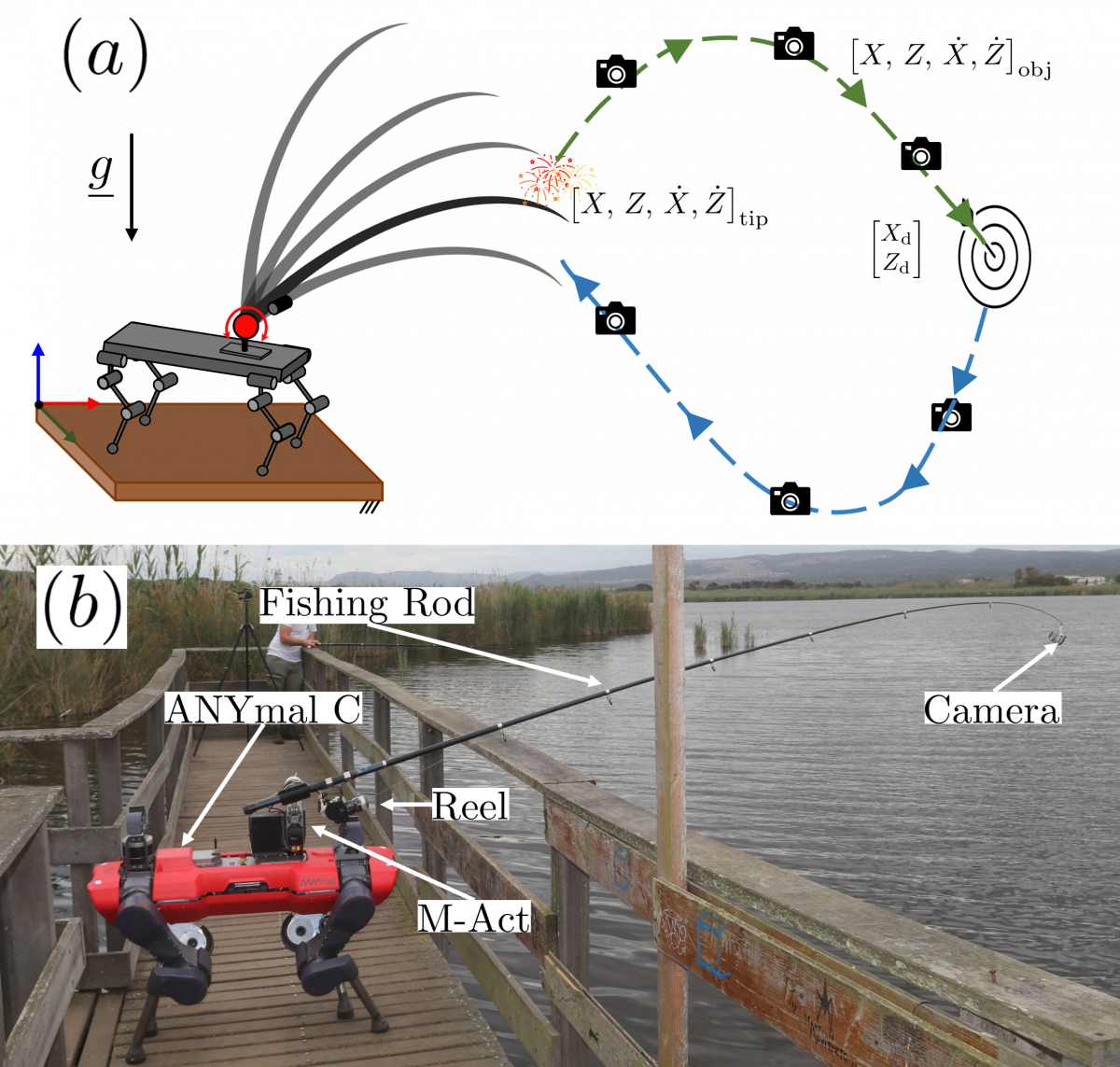

Grazie agli elementi elastici presenti nel loro design leggero, i robot flessibili possono eseguire traiettorie veloci utilizzando un numero limitato di attuatori. Pertanto, rappresentano una soluzione adatta al problema del lancio di piccoli oggetti (Fig. 1). Tuttavia, il controllo di qualsiasi robot morbido, ad esempio un robot con canna da pesca, è particolarmente impegnativo a causa dell'elevata elasticità, deformazione e non linearità intrinseche nella struttura meccanica. Pertanto, il compito di lancio si inserisce nelle più ampie sfide di modellazione, pianificazione e controllo per strutture flessibili. Il framework proposto potrebbe raccogliere dati sia lavorando da solo che come equipaggiamento per una piattaforma mobile per rilevare autonomamente punti difficili da raggiungere o per monitorare habitat naturali (Fig. 2).
![]()
Dipartimento di Ingegneria dell'Informazione
Via G. Caruso 16 - 56122 - Pisa
Tel +39 050 2217511 - info@dii.unipi.it
PEC: ing.informazione@pec.unipi.it
Info Didattica: didattica@dii.unipi.it
P.I. 00286820501 - C.F. 80003670504